


如何选用工业机器人 (二)
前言:
现今工业机器人主要分两大类——直角坐标机器人和关节机器人,这两类机器人在诸多工业领域得以广泛应用。直角坐标机器人的应用或者说直角坐标机器人本体的应用更多解决是物体(或手抓)在三维空间移动的问题。
一般情况下,机器人和负载之间存在两种工作工艺关系,(1)机器人通过机器人手抓完成工作工艺需求;(2)机器人通过手抓移动负载配合第三方设备进行工作工艺要求的完成。在这两种主要的机器人工作过程中,机器人手抓起到了非常关键的作用。
甚至,在很多时候,一个机器人项目能否成功,主要看机器人手抓设计的成不成功。机器人本体更多是解决移动中负载和精度问题。但机器人手抓除了负载和精度问题,还要求和具体工艺程序相关联。MOTEC(中国)的机器人工程师们多年从事工业机器人研发和制造,本文将以图文并茂的形式展现出MOTEC-ROBOT 机器人团队的一些案例。
机器人手抓系统
机器人手抓系统,这样表述其实更合适,因为在很多机器人项目中,机器人手抓的功能不亚于人手,并且需要步进或伺服系统的独立控制;也有的需要气动控制,还有的需要有较强的特殊工作要求,如高温,防腐等;有的机器人手抓本身就是加工工具,如激光头,亚弧焊焊枪或者干脆就是加工刀具;也有的就是胶阀,像北京意美德公司生产的点胶机器人就是个明显的例子。
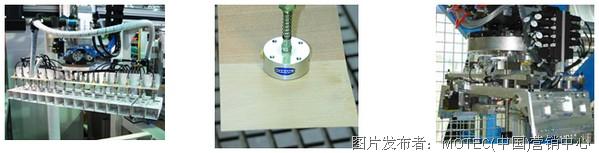
大多数应用中机器人的手爪系统就相当于人的手。但在复杂的应用中,机器人的手爪系统就相当于几个人的手同时抓取物体。更复杂时相当于几个人用手,另外几个人用工具才能完成抓取工作。根据要完成的具体抓取任务和设计者的经验,可以选择不同的手爪结构。
下面我们就搬运机器人和抓取机器人的手抓设计展示一些案例:
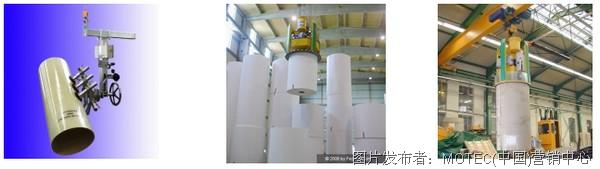
图一中 展示的是抓取圆柱形空心碳纤维缸体。要求不能划伤物体表面。
所以本方案既要考虑承载力,又要考虑不能划伤物体表面,因此,用气动吸盘家机械手抓的设计方案。
图二和图三中 展示的是柱状机械手抓取大负载的搬运过程。





 投诉建议
投诉建议
提交

MOTEC ARES系列直流伺服样本V2.0
网络控制低速步进应用

MOTEC 定制驱动器系列之智能步进4

MOTEC 定制驱动器系列之直流伺服5
MOTEC 定制驱动器系列之直流伺服6