


机器视觉技术中“视觉引导定位”深度解析
在工业生产领域,工业机器人的定位与抓取任务占据着举足轻重的地位。传统上,工业机器人通常依赖预先示教的方式,严格遵循预定指令动作来完成任务。然而,这种方式的局限性十分明显,一旦工件状态发生改变,机器人便难以顺利完成既定工作,这无疑给工业生产带来了极大的不便与潜在风险。
在市场需求的强劲推动下,为机器人增添视觉引导功能已然成为机器人领域的热门研究方向。视觉引导技术通过模拟人类眼睛的工作原理,助力工业机器人精准检测工件的位置状态,并利用获取的视觉信息引导机器人完成定位与抓取任务。这一创新技术极大地克服了传统工业机器人的固有弊端,显著提升了工业机器人应用的灵活性与实时性。
从本质层面来讲,机器视觉系统在工业环境中发挥着多重关键作用,涵盖引导机器人、测量物品、抓取物品、读取条码、字母和数字,以及检测缺陷等多个方面。在各类机器视觉应用中,无论是最基础的装配检验,还是复杂的机器人箱子拾取应用,通常第一步都是运用图案匹配技术,精准定位相机视场内的物品或特征。物品定位的准确性,往往直接决定了机器视觉应用的成败。

视觉引导机器人定位抓取系统
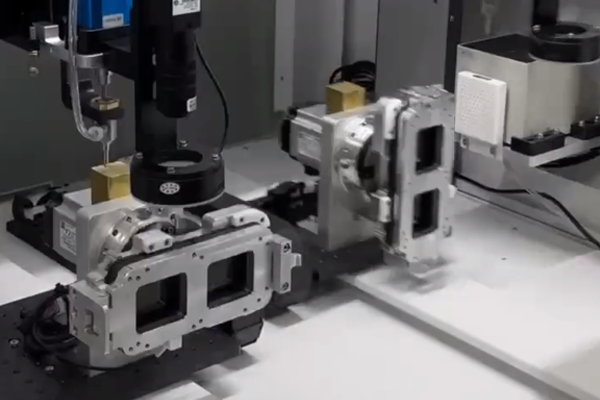
视觉引导机器人定位抓取系统,是借助机器人视觉实现工件抓取点的精准视觉定位,随后将定位数据传输至工业机器人,引导机器人依据视觉信息定位至工件抓取点并完成抓取任务的系统。该系统框架主要由机器人视觉、上位机、工业机器人和抓取目标四部分构成。
其中,机器人视觉系统是核心组成部分,涵盖相机、镜头、光源和视觉软件。相机负责采集图像,镜头用于聚焦成像,光源提供适宜的照明条件,视觉软件则对采集到的图像进行处理,实现工件抓取点的视觉定位。上位机作为数据传输枢纽,通过以太网将工件抓取点的位置数据准确发送给工业机器人。最终,工业机器人接收定位数据,借助控制器引导机器人本体运动至工件抓取点,并利用机器人的工具完成抓取、放置工件的任务。

视觉引导与定位功能详解
机器视觉采用先进的图像视觉检测技术,能够对高速运动的工业产品进行实时、全面的视觉定位分析,这一功能在自动装配及生产过程中发挥着关键作用。
机器人视觉引导:机器人视觉引导主要是利用机器视觉来报告组件的位置和方向。在自动化生产流水线中,机器视觉系统能够实时监测机器人在操作过程中以及工作环境中的变化,并迅速作出相应调整动作,确保任务能够正确完成。
机器人视觉定位:机器人视觉定位要求机器视觉系统能够快速、准确地找到被测零件,并确认其位置。在上下料环节,机器视觉可精准定位,引导机械手臂准确抓取零件。

机器视觉元件定位的重要性
在机器视觉应用中,元件定位是至关重要的一步。如果图案匹配软件工具无法在图像中准确定位元件,那么后续的引导、识别、验证、计数或测量元件等操作都将无法进行。尽管这一步骤听起来简单,但在实际生产环境中,由于照明条件变化或元件被遮挡等因素导致的外观变化,可能会使元件定位变得异常困难。
虽然视觉系统经过专业培训,能够基于图案来识别元件,但是在严格控制的流程中,元件外观也难免存在一定的变化。此外,元件呈现或姿势畸变也可能影响元件定位的准确性。为了实现精确、可靠、可重复的结果,视觉系统的元件定位工具必须具备足够的智能,能够快速、精确地将培训图案与生产线上移动过来的实际物品进行比较,确保定位的准确性。
机器视觉引导在众多任务中都能够实现比人工定位高得多的速度和精度,如将元件放入货盘或从货盘中拾取元件、对输送带上的元件进行包装、对元件进行定位和对位以便将其与其他部件装配在一起、将元件放置到工作架上或者将元件从箱子中移走等。这些优势使得机器视觉引导在工业生产中的应用前景愈发广阔。




 投诉建议
投诉建议
提交

机器视觉的智能手机包边应用
机器视觉的电子元器件激光打标应用
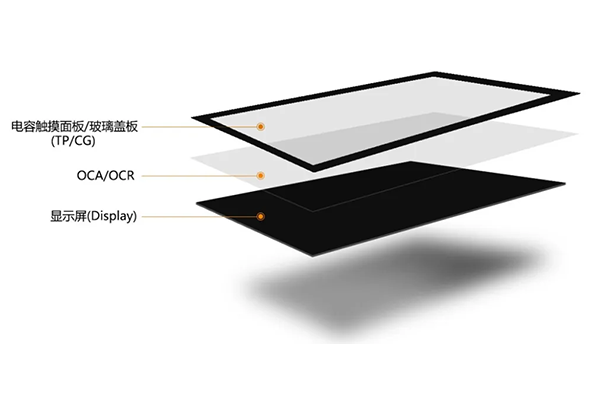
机器视觉引导OCA真空贴合机应用

机器视觉的PC片材薄膜丝印应用
机器视觉的电动车锂电池叠片应用