


易帝TH250 机器人系统
2009/6/30 9:36:58

产品简介:
手臂长度:250毫米 工作范围: 轴1: +/- 115度 轴2: +/- 140度 轴3: 120 毫米 轴4: +/- 360度 最大速度: 轴1: 480度/秒 轴2: 480度/秒 轴3: 1067毫米/秒 轴4: 1143度/秒 组合: 3.14米/秒
产品分类:运动控制 工业机器人 弧焊机器人 点焊机器人 关节型喷涂机器人 码垛机器人 机加工机器人 搬运机器人 精密及重载装配机器人 涂胶机器人 洁净机器人
品牌:易帝
产品介绍
手臂长度:250毫米
工作范围:
轴1: +/- 115度
轴2: +/- 140度
轴3: 120 毫米
轴4: +/- 360度
最大速度:
轴1: 480度/秒
轴2: 480度/秒
轴3: 1067毫米/秒
轴4: 1143度/秒
组合: 3.14米/秒
最大负载: 3Kg
终端允许的最大瞬时惯量:0.017Kg.m.m(在极限加速度下)
重复定位精度:
X/Y: +/- 0.01毫米
Z : +/- 0.01毫米
轴4: +/- 0.03度
驱动方式: 交流伺服
I/O: 14路I/O
重量: 15Kg

工作范围:
轴1: +/- 115度
轴2: +/- 140度
轴3: 120 毫米
轴4: +/- 360度
最大速度:
轴1: 480度/秒
轴2: 480度/秒
轴3: 1067毫米/秒
轴4: 1143度/秒
组合: 3.14米/秒
最大负载: 3Kg
终端允许的最大瞬时惯量:0.017Kg.m.m(在极限加速度下)
重复定位精度:
X/Y: +/- 0.01毫米
Z : +/- 0.01毫米
轴4: +/- 0.03度
驱动方式: 交流伺服
I/O: 14路I/O
重量: 15Kg




 投诉建议
投诉建议
提交
查看更多评论
其他资讯
苏州钧信 EtherCAT智能直流伺服系统

苏州钧信 智能总线伺服系统
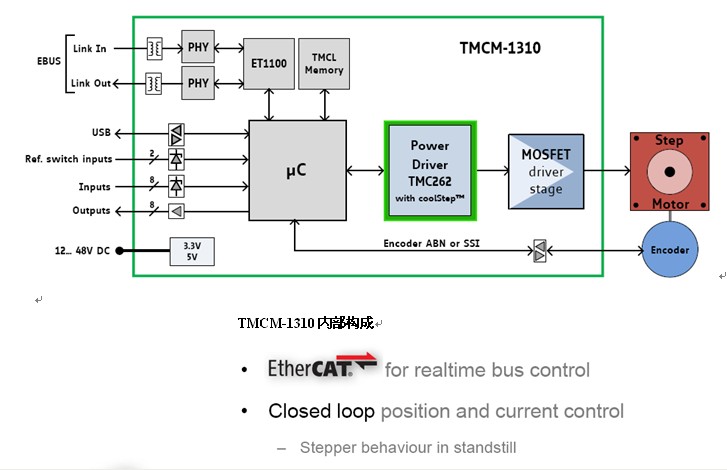
TRINAMIC TMCM-1310 EtherCAT通讯闭环控制步进伺服
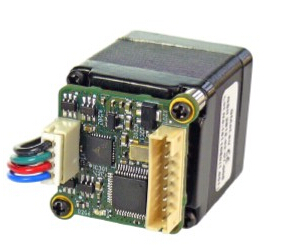
微型RS485通讯步进电机控制驱动器

微型RS485通讯步进电机控制驱动器