运动控制频道
































-
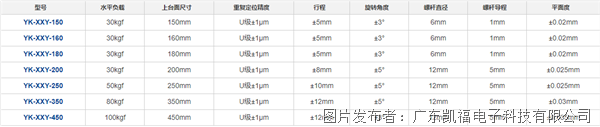 凯福科技高精度对位平台
凯福科技高精度对位平台集运动控制、视觉系统解决方案为一体,在锂电设备、半导体设备、光纤通信5G设备等领域有着广泛的应用,大大提高了产品的精度及生产效率,为客户工厂实现工业自动化,提供高效、全面、可靠的技术和服务。
 2025-07-17
2025-07-17标签: 对位平台
-
 小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
-
微案例 | Elmo如何助力生命科学企业打造核心竞争力?
不同类型的企业面对这个问题,解决方案不尽相同,但对于医疗化验室、医药公司和生物科技公司而言,自动化实验流程是必然选择。
-
罗克韦尔Kinetix TLP 多功能伺服电机,框架尺寸046...235 mm安装指
资料介绍了产品的规格参数及安装注意事项等。
2025-07-15标签: 罗克韦尔 Kinetix TLP 伺服电机
-
罗克韦尔Kinetix 5100 EtherNet/IP 索引脉冲伺服驱动器用户手册
本手册给出了 Kinetix 5100® 驱动器安装、接线和故障处理的详细信息,并介绍了驱动器 / 电机与 Logix 控制器的系统集成。
2025-07-15标签: 罗克韦尔 Kinetix 5100 伺服驱动器
-
罗克韦尔Kinetix 5300 单轴 EtherNet/IP 伺服驱动器安装指南
资料对产品的规格参数及安装接线要求进行了介绍。
2025-07-15标签: 罗克韦尔 Kinetix 5300 伺服驱动器
-
信捷DP3SL系列开环RS485步进驱动器用户手册
主要包括产品简介、安装及接线、驱动器接口介绍、RS485 总线通讯、PR 功能介绍、参数说明及设置等内容,可供选型、安装、操作参考。
-
信捷DP3S系列闭环RS485步进驱动器用户手册
主要包括产品简介、安装及接线、RS485 总线通讯、PR 功能介绍、参数说明及设置等内容,可供选型、安装、操作参考。
-
高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!
松下GM5系列运动控制器是面向高速/高精/复杂运动控制应用场景的高端型可编程运动控制器。基于 CODESYS V3 平台,配备 4核高性能CPU,支持 IEC61131-3 编程语言和 PLCopen标准。采用 2ch EtherCAT 总线架构,最大支持128轴控制,为大型工厂自动化和复杂产线提供专业的控制解决方案。
-
 高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!
高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!松下GM5系列运动控制器是面向高速/高精/复杂运动控制应用场景的高端型可编程运动控制器,为大型工厂自动化和复杂产线提供专业的控制解决方案。
-
 湖南凌翔磁浮项目入选2025年度湖南省重点研发计划!
湖南凌翔磁浮项目入选2025年度湖南省重点研发计划!近日,湖南省科技厅发布了关于2025年度湖南省重点研发计划项目立项的通知,我司“高精度磁悬浮输送系统关键技术研究及示范应用”项目成功入选,此次申报联合鸿富锦精密电子(成都)有限公司、楚天科技股份有限公司、长沙亿斯特智能科技有限公司,共同致力于高精度磁悬浮输送系统的技术攻关与应用示范。
-
 凌动MTS-磁悬浮输送系统获评2025 A+ Awards汽车智造技术突破创新奖
凌动MTS-磁悬浮输送系统获评2025 A+ Awards汽车智造技术突破创新奖7月9日,AMTS上海国际汽车制造技术与装备及材料展览会公布2025年度A Awards汽车智造先锋奖。凌翔磁浮自主研发的“凌动MTS-磁悬浮输送系统”获评技术突破创新奖。该奖项聚焦汽车制造领域具有重大实用价值的技术突破。公司副总经理兼智驱事业部总经理年佳出席仪式并领奖。
-
 对话“节能增效行动”:以能效提升为引擎,驱动可持续未来
对话“节能增效行动”:以能效提升为引擎,驱动可持续未来近日,“节能增效行动”(Energy Efficiency Movement,简称EEM)协会执行董事Mike Umiker开启上任后的首次访华,为中国企业带来了全球能效提升的最新经验与理念。工控网借此机会对Mike Umiker进行了专访,深入探讨了EEM的最新动态以及中国在全球能效转型中发挥的重要作用。
-

-
 是的,还有高手…! 奇石乐携全新高速伺服压机系统NCFQ亮相AHTE2025
是的,还有高手…! 奇石乐携全新高速伺服压机系统NCFQ亮相AHTE2025是的,还有高手…! 奇石乐携全新高速伺服压机系统NCFQ亮相AHTE2025
2025-07-08标签: 奇石乐、高速伺服...
-
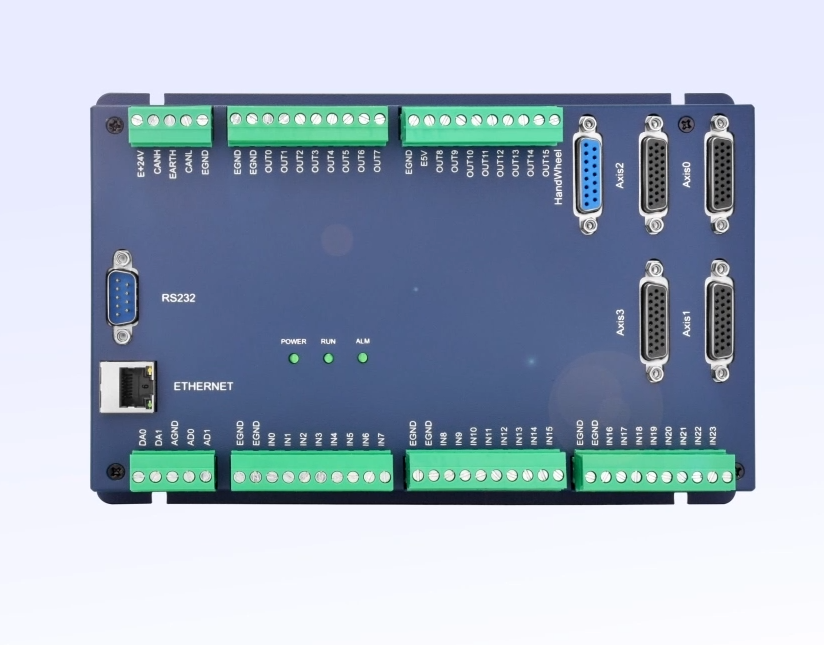
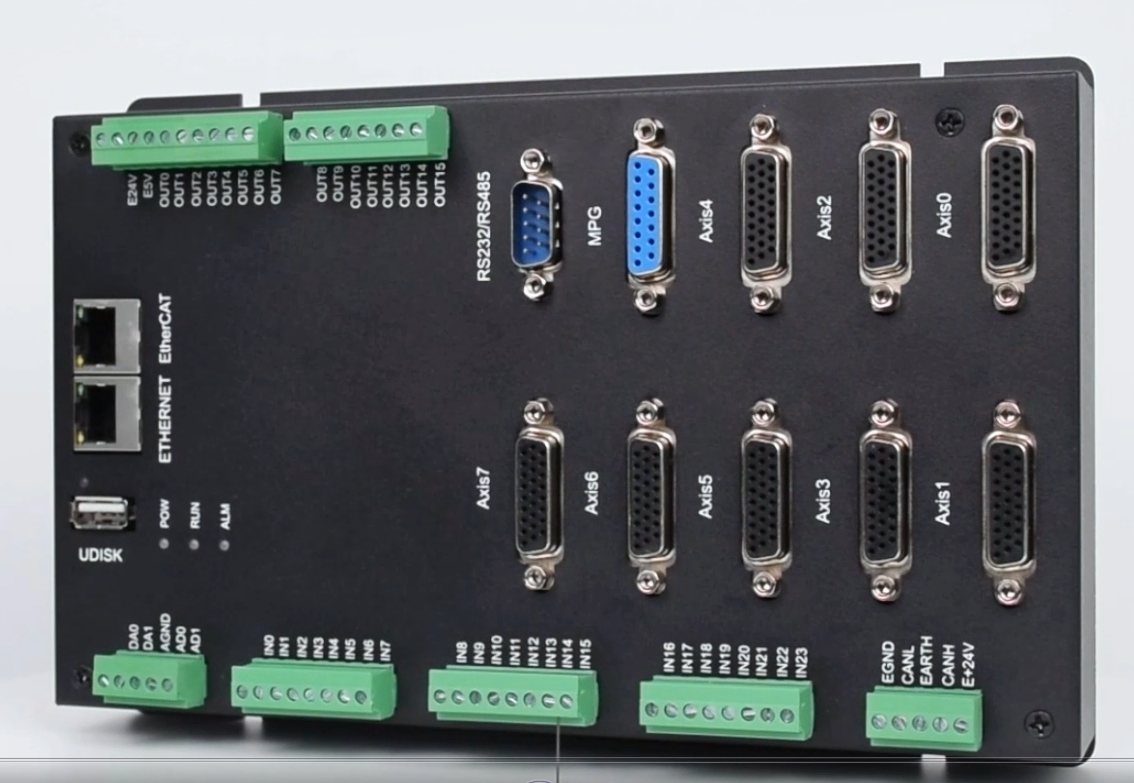
 YAKO研控驱动器YKD2405MC
YAKO研控驱动器YKD2405MC电流控制平滑,精准,电机发热小 最高脉冲响应频率可达400Kpps 步进脉冲停止超过300ms时,电机电流减半
- +加载更多
 2025-07-17
2025-07-17-
凯福科技高精度对位平台
集运动控制、视觉系统解决方案为一体,在锂电设备、半导体设备、光纤通信5G设备等领域有着广泛的应用,大大提高了产品的精度及生产效率,为客户工厂实现工业自动化,提供高效、全面、可靠的技术和服务。
2025-07-17标签: 对位平台
-
小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
-
信捷DP3SL系列开环RS485步进驱动器用户手册
主要包括产品简介、安装及接线、驱动器接口介绍、RS485 总线通讯、PR 功能介绍、参数说明及设置等内容,可供选型、安装、操作参考。
-
信捷DP3S系列闭环RS485步进驱动器用户手册
主要包括产品简介、安装及接线、RS485 总线通讯、PR 功能介绍、参数说明及设置等内容,可供选型、安装、操作参考。
-
高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!
松下GM5系列运动控制器是面向高速/高精/复杂运动控制应用场景的高端型可编程运动控制器,为大型工厂自动化和复杂产线提供专业的控制解决方案。
- +更多资讯
-
小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
小莫星品|安全之选!Platinum Harmonica高功率密度伺服驱动器
-
高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!
松下GM5系列运动控制器是面向高速/高精/复杂运动控制应用场景的高端型可编程运动控制器,为大型工厂自动化和复杂产线提供专业的控制解决方案。
-
 新品推介|固高GSFD mini系列低压伺服驱动器
新品推介|固高GSFD mini系列低压伺服驱动器固高科技,作为行业内的知名品牌,拥有深厚的技术底蕴和强大的研发实力。多年来,始终致力于伺服驱动技术的研发与创新,在工业自动化领域积累了丰富的经验。研发团队汇聚了众多行业精英,凭借着对技术的执着追求和对市场需求的敏锐洞察力,不断推陈出新,为固高科技的产品注入了强大的技术内核。新推出的GSFD mini系列低压伺服驱动器是..
-
 奥托尼克斯新品上市 | 模块型多通道功率控制器SPRS系列
奥托尼克斯新品上市 | 模块型多通道功率控制器SPRS系列SPRS系列模块化多通道功率控制器结合控制模块和电源模块,精确控制加热设备的温度。通过多达36个单元的电源分配控制功能,可以实现高效的功率控制。各种控制方式和报警功能也一应俱全。
2025-06-18标签: 奥托尼克斯 模块型多通道功率...
-
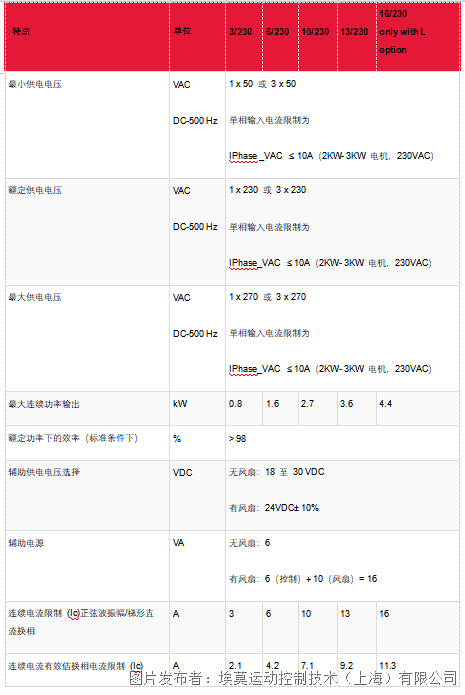 埃莫运动Gold Oboe伺服驱动器
埃莫运动Gold Oboe伺服驱动器G-OBOE峰值功率超过 10,000W,超快响应,高带宽, 1:2000 的电流环路动态范围和内置制动电路,是一款优秀的伺服驱动器,适用于需要极高动态响应、极高精度、平滑度和极低速度处理与快速运动相结合的应用。
-

- +更多资讯
-
湖南凌翔磁浮项目入选2025年度湖南省重点研发计划!
近日,湖南省科技厅发布了关于2025年度湖南省重点研发计划项目立项的通知,我司“高精度磁悬浮输送系统关键技术研究及示范应用”项目成功入选,此次申报联合鸿富锦精密电子(成都)有限公司、楚天科技股份有限公司、长沙亿斯特智能科技有限公司,共同致力于高精度磁悬浮输送系统的技术攻关与应用示范。
-
凌动MTS-磁悬浮输送系统获评2025 A+ Awards汽车智造技术突破创新奖
7月9日,AMTS上海国际汽车制造技术与装备及材料展览会公布2025年度A Awards汽车智造先锋奖。凌翔磁浮自主研发的“凌动MTS-磁悬浮输送系统”获评技术突破创新奖。该奖项聚焦汽车制造领域具有重大实用价值的技术突破。公司副总经理兼智驱事业部总经理年佳出席仪式并领奖。
-
对话“节能增效行动”:以能效提升为引擎,驱动可持续未来
近日,“节能增效行动”(Energy Efficiency Movement,简称EEM)协会执行董事Mike Umiker开启上任后的首次访华,为中国企业带来了全球能效提升的最新经验与理念。工控网借此机会对Mike Umiker进行了专访,深入探讨了EEM的最新动态以及中国在全球能效转型中发挥的重要作用。
-
是的,还有高手…! 奇石乐携全新高速伺服压机系统NCFQ亮相AHTE2025
是的,还有高手…! 奇石乐携全新高速伺服压机系统NCFQ亮相AHTE2025
2025-07-08标签: 奇石乐、高速伺服...
-
 迈信电气携EP5高性能伺服驱动器亮相慕尼黑双展
迈信电气携EP5高性能伺服驱动器亮相慕尼黑双展当地时间6月24日,慕尼黑国际光博会(Laser World of Photonics)和慕尼黑国际机器人及自动化技术博览会(automatica)在慕尼黑展览中心盛大开幕。
-
 茵梦达与信易电热机械股份有限公司达成战略合作,深耕塑胶机械制造行业应用,携手共赢
茵梦达与信易电热机械股份有限公司达成战略合作,深耕塑胶机械制造行业应用,携手共赢茵梦达与信易电热机械股份有限公司达成战略合作,深耕塑胶机械制造行业应用,携手共赢
- +更多资讯
-
罗克韦尔Kinetix TLP 多功能伺服电机,框架尺寸046...235 mm安装指
资料介绍了产品的规格参数及安装注意事项等。
2025-07-15标签: 罗克韦尔 Kinetix TLP 伺服电机
-
罗克韦尔Kinetix 5100 EtherNet/IP 索引脉冲伺服驱动器用户手册
本手册给出了 Kinetix 5100® 驱动器安装、接线和故障处理的详细信息,并介绍了驱动器 / 电机与 Logix 控制器的系统集成。
2025-07-15标签: 罗克韦尔 Kinetix 5100 伺服驱动器
-
罗克韦尔Kinetix 5300 单轴 EtherNet/IP 伺服驱动器安装指南
资料对产品的规格参数及安装接线要求进行了介绍。
2025-07-15标签: 罗克韦尔 Kinetix 5300 伺服驱动器
- +更多资讯
-
微案例 | Elmo如何助力生命科学企业打造核心竞争力?
不同类型的企业面对这个问题,解决方案不尽相同,但对于医疗化验室、医药公司和生物科技公司而言,自动化实验流程是必然选择。
-
高速 | 高精 | 高性能——松下升级款运动控制器GM5系列全新上市!
松下GM5系列运动控制器是面向高速/高精/复杂运动控制应用场景的高端型可编程运动控制器。基于 CODESYS V3 平台,配备 4核高性能CPU,支持 IEC61131-3 编程语言和 PLCopen标准。采用 2ch EtherCAT 总线架构,最大支持128轴控制,为大型工厂自动化和复杂产线提供专业的控制解决方案。
-
【固高GSHD系列高性能伺服驱动器系列教程】—用户模式配置(上)、用户模式配置(下)
GSHD系列高性能伺服驱动器的硬件与软件采用创新设计,可对所有主流电机进行高性能控制。其外形轻巧,调试简单,并具有广泛的通用性
-
Elmo助力康复机器人Atalante突破临床最后一公里
日前,全球领先的机械外骨骼康复机器人公司Wandercraft宣布正式启动新一代个人外骨骼机器人Atalante临床试验,为脊髓损伤患者提供独立行走可能。
-
智能算法赋能——一站式高速立式包装机解决方案
为应对立式包装机常见挑战,松下推出一站式高速立式包装机方案,旨在提升设备的稳定性、兼容性以及操作便捷性,提升生产效率和保证产品质量。
-
欧姆龙NEV应用·扁线电机05 | 定子全自动插纸机:提升轴的同步性和插线效率,降低设备投入成本
NEV(新能源汽车)行业应用专题将为您介绍欧姆龙在整车、NEV主要部品(电机)领域的相关案例。
- +更多资讯
-
「科瑞特自动化技术」关于步进电机及驱动器的使用经验分享
关于步进电机及驱动器的使用经验分享 1、电流设置: ●驱动器的电流设置并不按电机标称的额定参数设置。我的经验:按电机额定电流的70%为参考,正常运行10分钟以上,摸下电机温度,温度偏低,可以增加电流;温度偏高,应减小电流;步进电机工作时会发热,40-65度均为正常。 ●设备可以正常运行,而步进电机不发热,说明电机选大了(没有什么..
2025-07-17 -
「科瑞特自动化技术」DMC600M 系列运动控制器功能
DMC600M系列运动控制器深圳市科瑞特自动化公司自主研发、基于DMC300产品系列在市场的成熟应用、最新推出的开放型通用运动控制器,是DMC-M系列中的重点产品分支;可支持多个(最多254个)控制器和 PC/触摸屏组成控制网络;也可应用于需要独立运行的场合。 DMC600M系列运动控制器,其硬件结构基于高性能DSP为控制核心、..
2025-07-17 -
【正运动技术】认识PSO技术
PSO(positionsynchronizedoutput)也就是位置同步输出,本质上是通过采集实时的编码器反馈位置(无编码器可使用输出的脉冲位置)与比较模式设定的位置进行比较,控制OP高速同步输出信号,PSO示意图如下。 在点胶行业中PSO一般与点胶喷射阀等设备同步输出信号进行相位同步,在运动轨迹的所有阶段以恒定的空间(或者恒定时间)间隔触..
2025-07-16 -
「科瑞特自动化技术」步进电机选型
判断需多大力矩:静扭矩是选择步进电机的最重要参数。负载大时,需采用大力矩电机。力矩指标大时,电机外形也大。 选择电机的安装规格:如57、86、110等,除考虑力矩外,电机的安装空间是否受限、后续是否方便替换也需考虑, 以下经验可供参考: 1、 参考类似应用:负载差不多的,人家用多大的,我也用多大的; 2、&..
2025-07-16 -
【正运动技术】回零运动方向与实际规划方向相反问题处理
问题描述:回零运动方向与实际规划方向相反(DATUM(13)实际往负向回零的可能原因) 解决方法: 1.可能原点信号极性反了,检测原点传感器信号的常开/常闭状态是否需要反转,IO信号反转通过Invert_in指令设置; 2.原点信号误触发,导致控制器接收到了原点信号,以爬行速度在反向运行; 3.可能是电机方向反了,检查手动运动的方向是否..
2025-07-15 -
格拉尼granistudio-gs软件平台与TwinCat对比分析
TWinCat(TheWindowsControlandAutomationTechnology)是德国倍福(Beckhoff)开发的工业自动化软件平台,基于Windows系统并通过实时扩展技术实现工业级控制,核心功能包括: PLC编程与逻辑控制:支持 IEC61131-3 标准语言(LD/FBD/ST),兼容PLCopen运动控制规范,适用于复杂逻辑开发(如汽车焊装线多工位协同)。 高精度运动..
2025-07-12 - 更多资讯